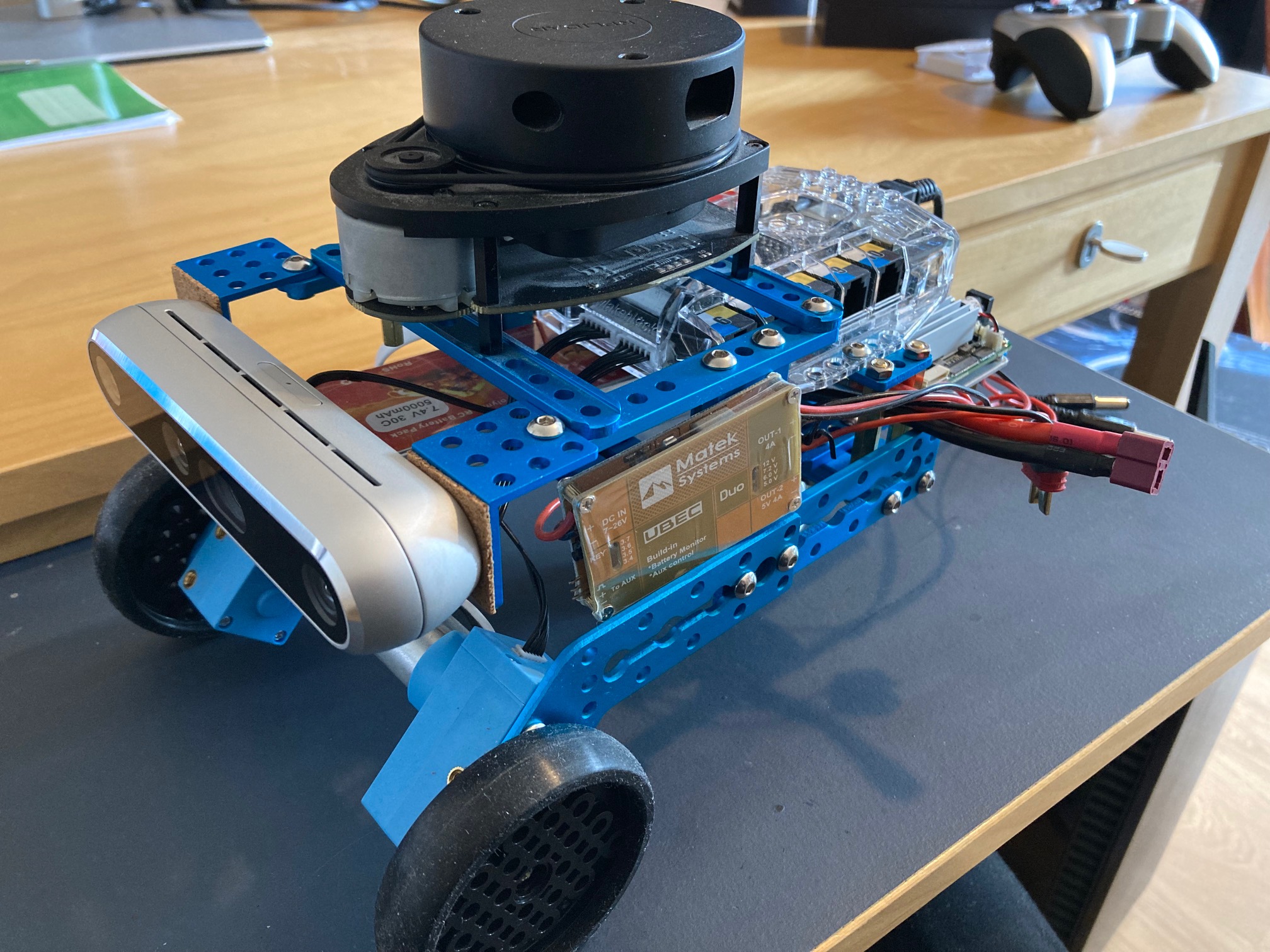
Caster-wheel setup

View of the Intel Realsense depth camera
Matek regulator with double output

SLAMTEC Rplidar A1
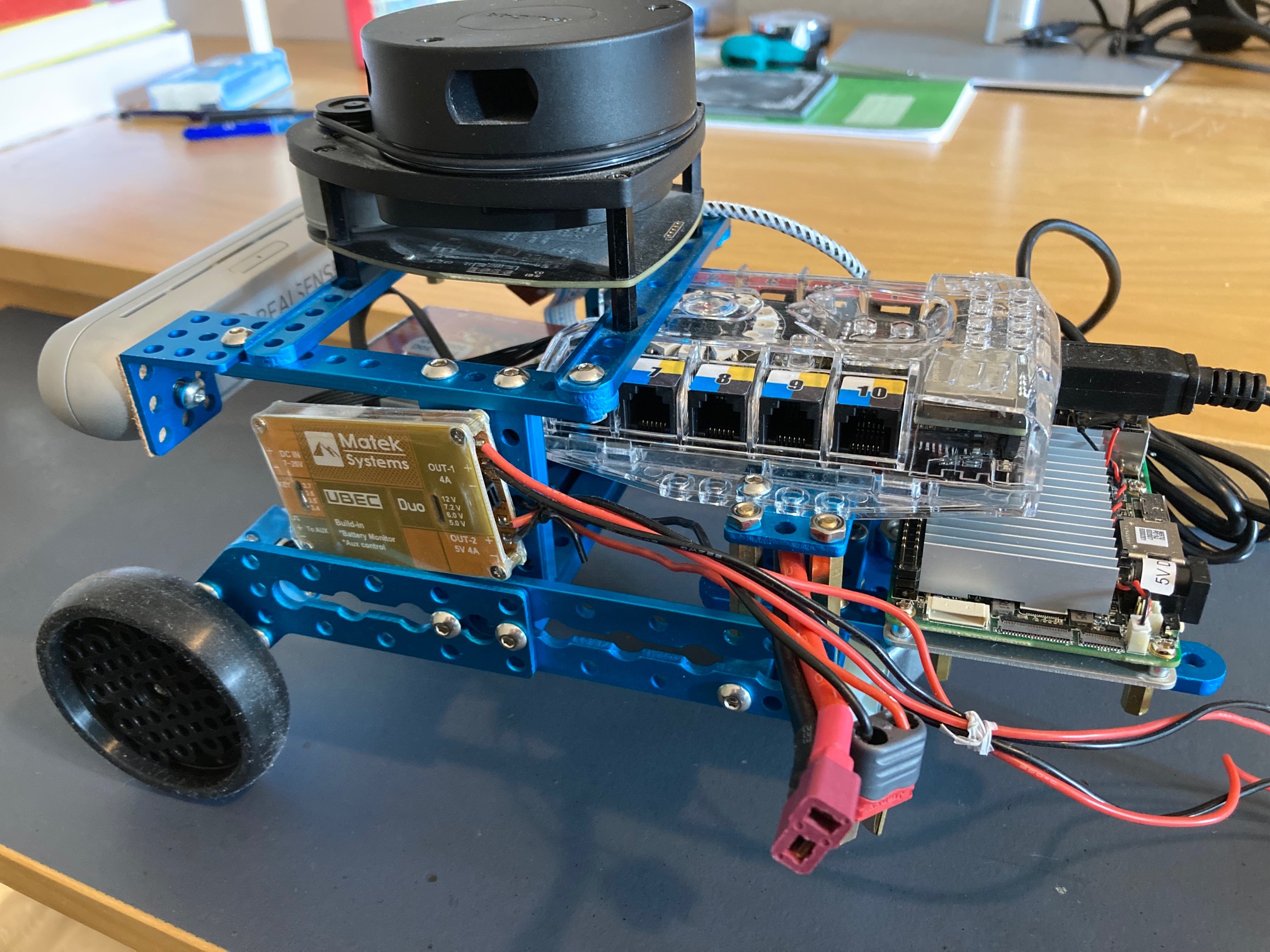
Caster-wheel setup
View of the Intel Realsense depth camera
Matek regulator with double output
SLAMTEC Rplidar A1
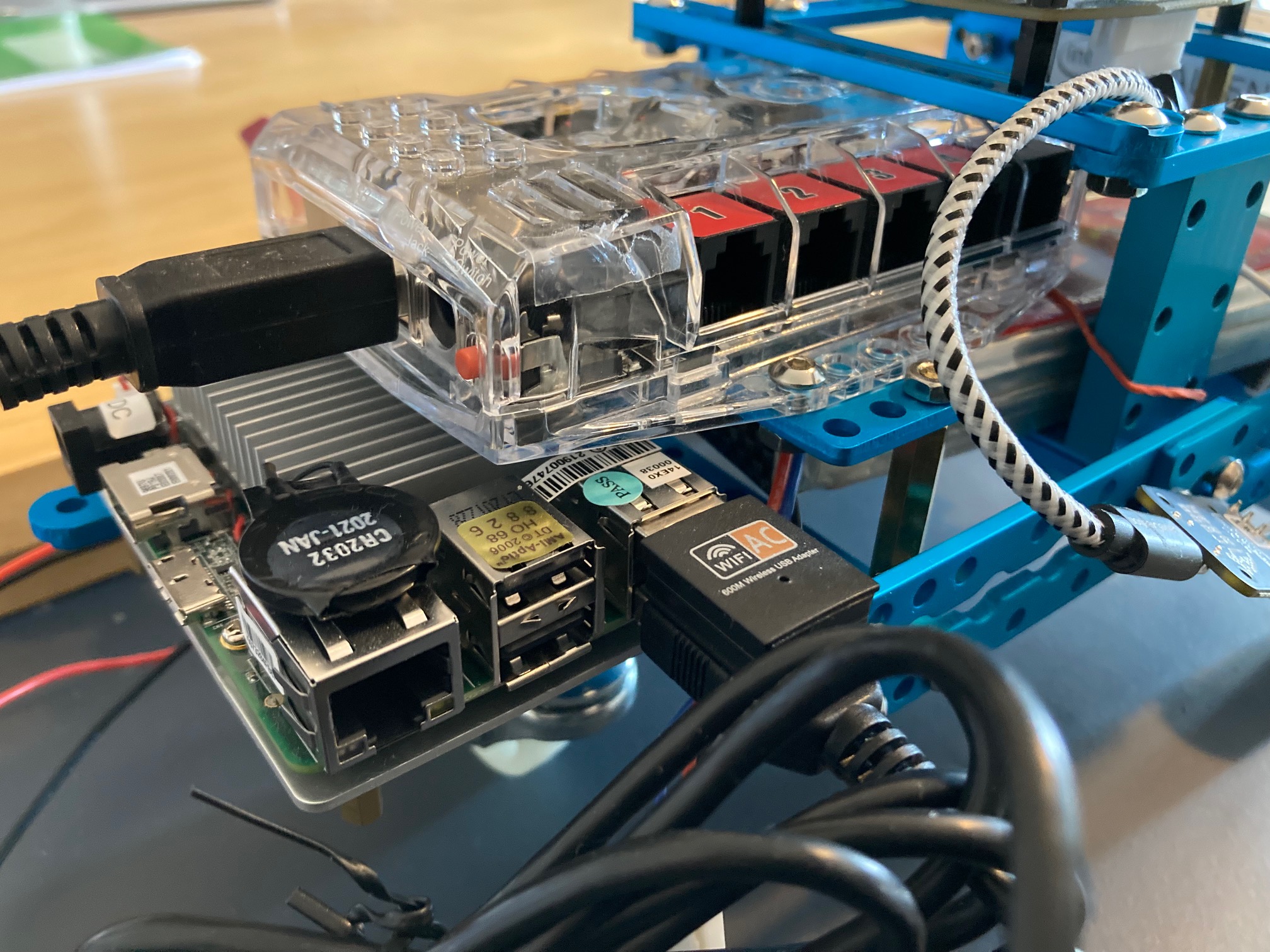
Close-up of the Up Board and Arduino
Floureon battery

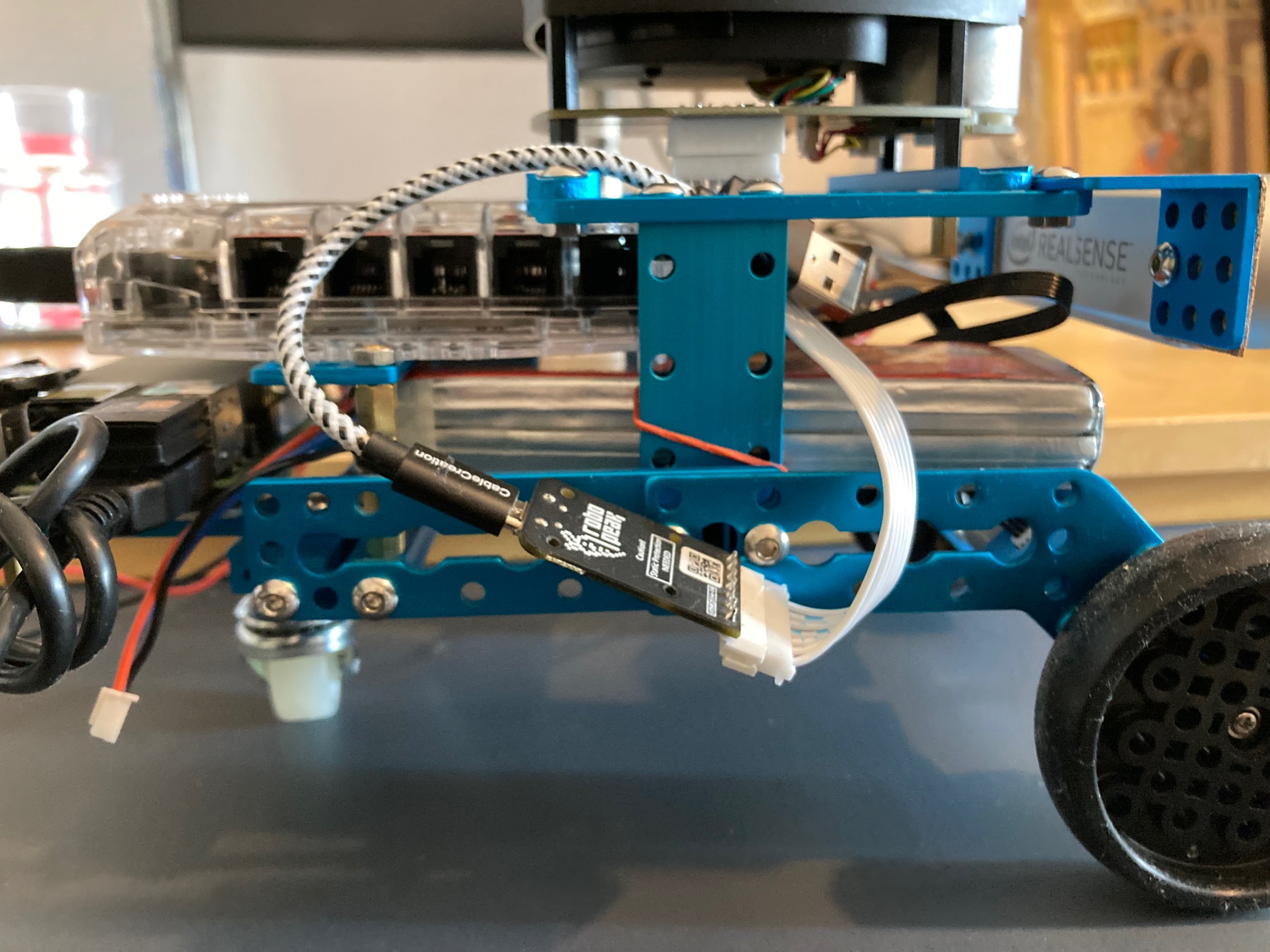
Wire salad
